 咨詢電話:18128028677
咨詢電話:18128028677
咨詢電話:18128028677 產品列表PRODUCTS LIST
提高民用多旋翼無人機抗風性能是系統工程,核心是通過氣動結構優化、動力冗余強化、飛控算法升級及使用適配,提升風場中姿態穩定性與動力儲備,需從設計、測試到應用全流程發力。
一、氣動與結構設計優化(基礎核心)
優化旋翼配置:優先采用 6 軸 / 8 軸布局,比 4 軸提升動力冗余和姿態調整自由度,抗風穩定性可提升 30% 以上;選用寬弦長、高剛性槳葉,減少風載荷下的形變與顫振,建議槳葉厚度增加 10%-15%。
優化機身氣動外形:采用流線型機身設計,減少迎風阻力,機身側面投影面積降低 20% 以上;避免突兀的外掛結構,必要負載(如云臺、電池)采用內嵌式安裝,降低風阻系數。
合理配比重量與重心:控制機身重量在設計閾值內,避免無效負載;將電池、飛控等核心部件布置在中心區域,降低重心高度,提升抗側風時的穩定性,重心偏移量不超過機身半徑的 5%。
二、動力系統強化(動力保障)
升級電機與電調:選用高功率密度無刷電機,功率冗余提升至 50% 以上,確保陣風時能快速輸出額外動力;搭配低內阻、大電流電調,響應延遲控制在 10ms 以內,適配突發風載荷的動力需求。
優化電池性能:采用高放電倍率(≥25C)鋰電池,保證持續高功率輸出時的電壓穩定性;合理設計電池容量與重量配比,在續航與抗風動力之間找到平衡,避免因電池過重增加風阻。
提升動力系統協同性:通過標定電機轉速與槳葉推力的匹配曲線,確保多電機同步響應精度≤0.5%,減少風干擾下的動力輸出偏差。
三、飛控系統算法升級(智能核心)
優化姿態控制算法:升級 PID 參數自整定功能,結合模糊控制或模型預測控制,讓飛控快速適配風場變化,姿態調整響應時間≤0.2 秒,水平姿態角偏差控制在 ±2° 以內。
加入風干擾補償算法:通過 IMU(慣性測量單元)、GPS 與氣壓計的多傳感器融合,實時估算風場風速與風向,提前輸出補償指令,抵消風對軌跡的影響,航跡偏差可降低 40%。
提升傳感器精度與冗余:選用高精度 IMU(角速度wu差≤0.1°/s)和多模 GPS(定位精度 ±0.5m),增加視覺里程計作為輔助定位,避免風干擾下的定位漂移;關鍵傳感器采用雙冗余設計,確保數據可靠性。
四、測試與標定迭代(驗證優化)
開展全場景風場測試:利用抗風測試風墻,模擬持續風、陣風、切向風等復雜風況,從 3 級風到目標抗風等級(如 6 級)逐步遞增測試,記錄姿態、動力、軌跡數據,迭代優化設計。
進行ji端環境標定:在 - 20℃~50℃溫濕度范圍、不同海拔條件下,重新標定飛控與動力系統參數,避免環境因素影響抗風性能,確保ji端環境下動力輸出穩定性≥90%。
強化結構強度測試:通過風載荷沖擊測試,驗證機身、機臂及旋翼連接部位的剛性,確保在 1.5 倍目標抗風風速下無變形、無斷裂,結構安全系數≥1.2。
五、使用場景適配優化(落地保障)
控制有效負載:作業時避免超額掛載,負載重量不超過最大起飛重量的 30%,減少風阻與動力負擔。
優化飛行策略:根據實時風況調整飛行速度,側風環境下降低飛行速度 20%-30%;規劃航線時避開峽谷、高樓周邊等亂流多發區域,優先選擇逆風 / 順風飛行,減少側風影響。
提升操作適配性:為飛控增加 “抗風模式",開啟后自動提升動力冗余、收緊姿態控制參數,方便普通用戶在復雜風場中穩定操作。
關于我們
由Delta德爾塔儀器聯合電子科技大學(深圳)高等研究院——深思實驗室團隊、工信部電子五所賽寶低空通航實驗室研發制造的無人機抗風試驗風墻\可移動風場模擬裝置\風墻裝置,正成為解決無人機行業抗風性能測試難題的突破性技術。
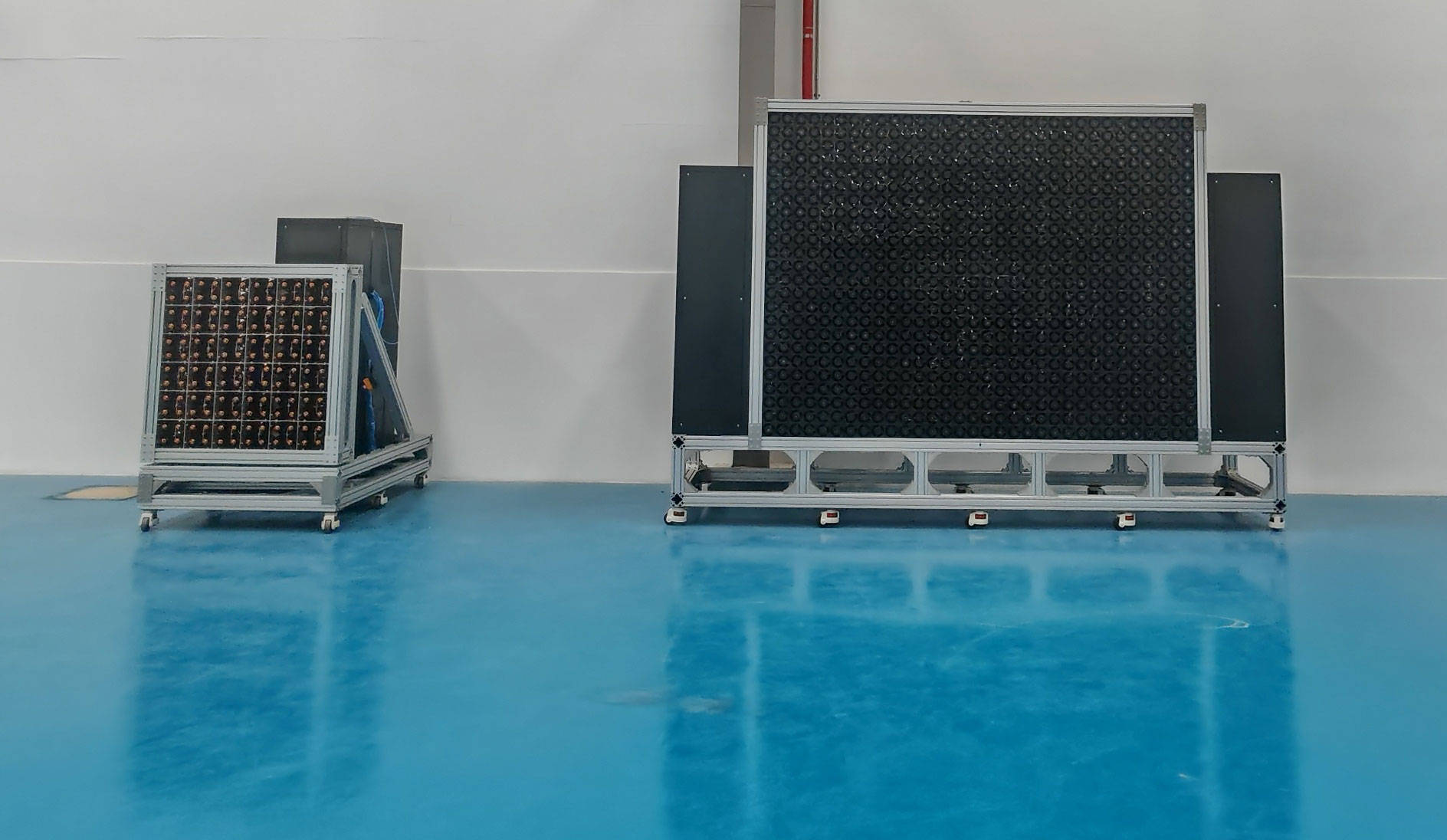

無人機風墻測試系統\無人機抗風試驗風墻\可移動風場模擬裝置\風墻裝置
